Design of Fuzzy Control of Intelligent Traffic Light Based on FPGA
**1 Overview**
In order to address the issue of urban traffic congestion, it is essential to implement measures from both the supply and demand sides. On the supply side, improving infrastructure by expanding road networks is crucial. On the demand side, optimizing the use of existing roads and enhancing their efficiency is equally important. Currently, most traffic signals in Chinese cities operate with a fixed green light ratio, which is not adaptive to the dynamic traffic conditions at intersections. This inflexibility often leads to inefficiencies and longer waiting times for vehicles.
Fuzzy control, as a key branch of intelligent control, is particularly effective in managing complex, nonlinear, and time-varying systems. It has been widely applied in various control fields due to its ability to handle uncertainty and multiple variables. In urban environments, there are numerous intersections, such as cross-shaped, X-shaped, T-shaped, Y-shaped, and multi-way intersections. This paper focuses on cross-shaped intersections as a case study.
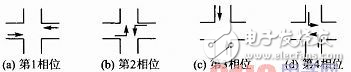
At a plane intersection, the right of way for one or more traffic flows is referred to as a signal phase. A traffic signal system typically consists of several phases within a cycle. For example, a two-way six-lane four-phase system includes: Phase 1 for east-west straight traffic, Phase 2 for east-west left turns, Phase 3 for north-south straight traffic, and Phase 4 for north-south left turns. Right turns are generally not controlled. The operation diagram of this system is illustrated in Figure 1.
**2 Fuzzy Controller Design**
A typical fuzzy controller consists of five main components: the fuzzification interface, the database, the rule base, the fuzzy inference engine, and the defuzzification interface. These components work together to convert crisp input values into fuzzy sets, apply fuzzy rules, and then produce a crisp output. Figure 2 illustrates the structure of a fuzzy controller.

**2.1 Membership Functions**
To perform fuzzification, it is necessary to define membership functions that map exact input values to fuzzy sets. Commonly used sets include PL (Positive Large), PM (Positive Medium), PS (Positive Small), ZE (Zero), NS (Negative Small), NM (Negative Medium), and NL (Negative Large). For high accuracy, a normal distribution can be used, but in general, triangular or trapezoidal shapes are preferred. This paper employs triangular membership functions.
During the red light period, the induction coil is set to 100 meters, and the average distance between vehicles is 5 meters. The measured queue length P is treated as a fuzzy variable, with the domain:
P = {1, 3, 5, 7, 9, 11, 13, 15, 17, 19, 21}.
Seven linguistic values are assigned, as shown in Table 1.
The difference Q between the current phase queue length and the next phase queue length is used to adjust the green light duration. Its domain is:
Q = {-12, -9, -6, -3, 0, 3, 6, 9, 12}.
Again, seven linguistic values are used, as listed in Table 2.
To avoid long waits, the minimum green time is set to 20 seconds, while the maximum is 60 seconds. The additional time for the green light is considered a fuzzy value, with the domain:
T = {4, 8, 12, 16, 20, 24, 28, 32, 36}.
Seven linguistic values are assigned, as shown in Table 3.
**2.2 Vehicle Detector**
A toroidal coil is used as the vehicle detector. The coil is embedded in the ground to form an LC oscillation circuit. When a vehicle passes over the coil, the presence of ferromagnetic material alters the inductance, which is detected as a pulse. From this, the frequency of passing vehicles can be calculated.
**2.3 Controller Design**
This paper uses a two-dimensional fuzzy controller, which has two input variables and one output. The general form of the fuzzy rules is:
IF X1 IS Ai AND X2 IS Bi THEN Y IS Ci.
By applying these rules, a fuzzy control rule table is generated, as presented in Table 4.
**3 Fuzzy Control FPGA Implementation**
**3.1 Introduction to Spartan3A/3AN**
FPGAs offer advantages such as high performance, large scale, reprogrammability, and low development costs. They are widely used in modern electronic systems. Xilinx’s Spartan3A/3AN FPGAs require the use of ISE software for design, simulation, synthesis, place and route, and online debugging. This paper utilizes the EElements ISE Development Kit along with ISE10.1 to develop a fuzzy control traffic light system. The project setup is shown in Figure 3.
Filter Choke Inductor,power Filter Inductor,PCB mount Filter Inductor,UU Filter Inductor,UTFilter Inductor
IHUA INDUSTRIES CO.,LTD. , https://www.ihuagroup.com